PID Algorithm Based LINe Following Robo
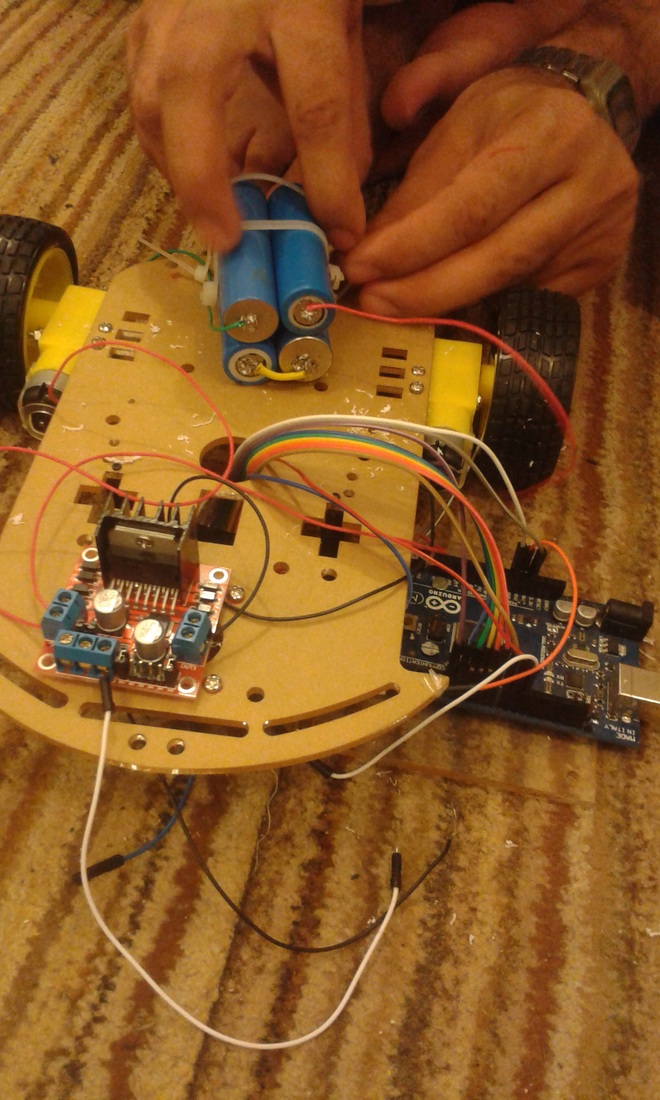
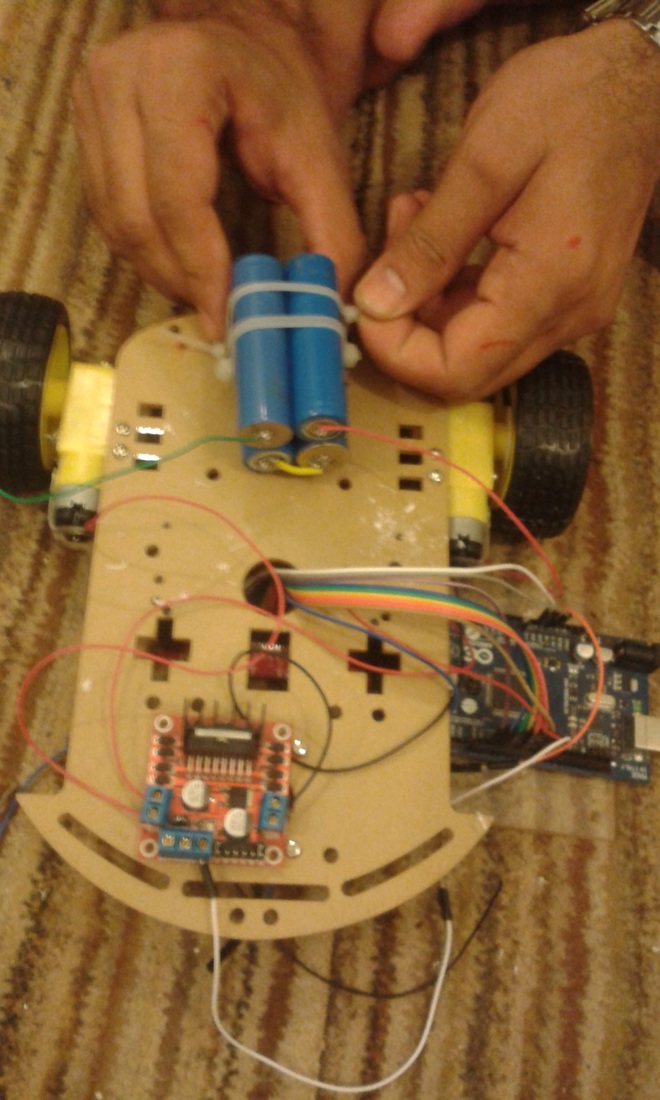
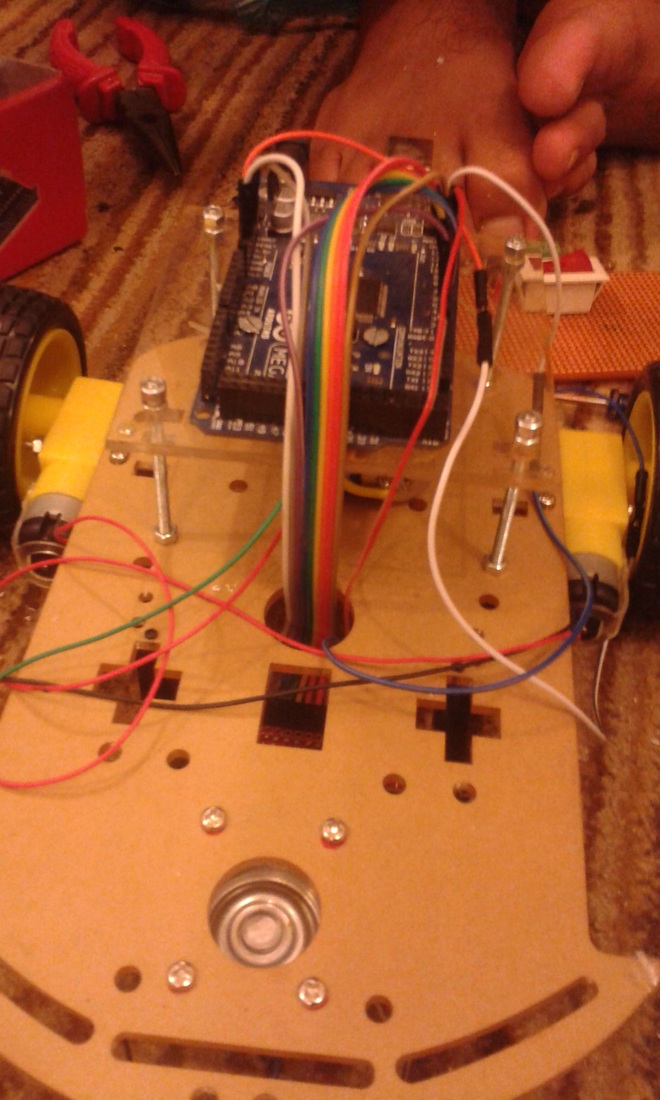
Line follower is an autonomous robot which follows either black line in white area or white line in black area. Robot must be able to detect particular line and keep following it. In this project i have used PID Algorithm by using PID sensor i.e (QTRC-Reflectance sensor array) for detecting line i.e. black or white line and i have used L293D H-Bridge motor control driver IC for controlling the two motors. The PID sensor used three values i.e kp,kd and ki in a closed loop operation which is responsible to make robot stable and keep following the line. Motors are control with Pwm channel of the Arduino board. The whole programming is done in basic C language structure. I had won Runner up prize in the Robo race competition in Icube 2015.